社区微信群开通啦,扫一扫抢先加入社区官方微信群

社区微信群
本文基于Golang go1.15.2 darwin/amd64
首先看以下并发和并行概念:
并发(concurrent): 逻辑上处理同时的任务的能力
并行(parallel): 物理上同一时间处理不同任务
一般来说,并发对应在单个处理器,通过串行的时间片分配(time slice)来执行任务。而并发,对应多个处理器,来执行不同的任务。
Golang中,执行多个任务时, Goroutine会创建不同的线程,也会将任务单元分配给其他线程来执行,这像是并发和并行的结合,能够最大化执行效率。
G是 Goroutine的缩写,相当于操作系统的进程控制块(process control block)。它包含:函数执行的指令和参数,任务对象,线程上下文切换,字段保护,和字段的寄存器。
下面代码来自 runtime/runtime2.go,可以看到,每个 Goroutine都有一个不导出的 goid。
type g struct {
m *m // current m; offset known to arm liblink
sched gobuf
...
param unsafe.Pointer // passed parameter on wakeup
goid int64
...
vdsoSP uintptr // SP for traceback while in VDSO call (0 if not in call)
vdsoPC uintptr // PC for traceback while in VDSO call
}
不同版本的Go语言, Goroutine的栈空间的默认值不一样。下面代码来自 runtime/proc.go。
const (
_StackMin = 2048
)
// Create a new g in state _Grunnable, starting at fn, with narg bytes
// of arguments starting at argp. callerpc is the address of the go
// statement that created this. The caller is responsible for adding
// the new g to the scheduler.
//
// This must run on the system stack because it's the continuation of
// newproc, which cannot split the stack.
//
//go:systemstack
func newproc1(fn *funcval, argp unsafe.Pointer, narg int32, callergp *g, callerpc uintptr) *g {
_g_ := getg()
if fn == nil {
_g_.m.throwing = -1 // do not dump full stacks
throw("go of nil func value")
}
acquirem() // disable preemption because it can be holding p in a local var
siz := narg
siz = (siz + 7) &^ 7
// We could allocate a larger initial stack if necessary.
// Not worth it: this is almost always an error.
// 4*sizeof(uintreg): extra space added below
// sizeof(uintreg): caller's LR (arm) or return address (x86, in gostartcall).
if siz >= _StackMin-4*sys.RegSize-sys.RegSize {
throw("newproc: function arguments too large for new goroutine")
}
...
}
M是一个线程,每个M都有一个线程的栈。如果没有给线程的栈分配内存,操作系统会给线程的栈分配默认的内存。当线程的栈制定,M.stack->G.stack, M的PC寄存器会执行G提供的函数。
type m struct {
/*
g0的线程栈与M相关
*/
g0 *g
Curg *g //M 现在绑定的G
// SP, PC registers for on-site protection and on-site recovery
vdsoSP uintptr
vdsoPC uintptr
...
}
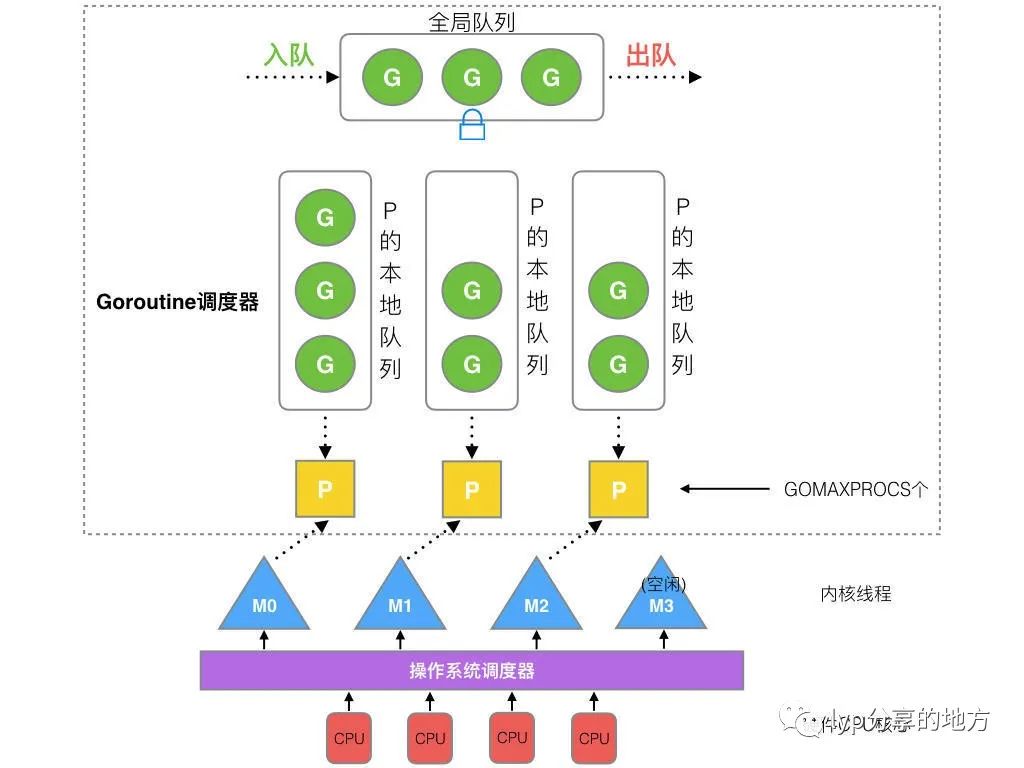
P(处理器,Processor)是一个抽象的概念,不是物理上的CPU。当一个P有任务,需要创建或者唤醒一个系统线程去处理它队列中的任务。
P决定同时执行的任务的数量, GOMAXPROCS限制系统线程执行用户层面的任务的数量。
// GOMAXPROCS sets the maximum number of CPUs that can be executing
// simultaneously and returns the previous setting. If n < 1, it does not
// change the current setting.
// The number of logical CPUs on the local machine can be queried with NumCPU.
// This call will go away when the scheduler improves.
func GOMAXPROCS(n int) int {
if GOARCH == "wasm" && n > 1 {
n = 1 // WebAssembly has no threads yet, so only one CPU is possible.
}
lock(&sched.lock)
ret := int(gomaxprocs)
unlock(&sched.lock)
if n <= 0 || n == ret {
return ret
}
stopTheWorldGC("GOMAXPROCS")
// newprocs will be processed by startTheWorld
newprocs = int32(n)
startTheWorldGC()
return ret
}
首先创建一个G对象,然后G被保存在P的本地队列或者全局队列(global queue)。这时P会唤醒一个M。P按照它的执行顺序继续执行任务。M寻找一个空闲的P,如果找得到,将G移动到它自己。然后M执行一个调度循环:调用G对象->执行->清理线程->继续寻找Goroutine。
在M的执行过程中,上下文切换随时发生。当切换发生,任务的执行现场需要被保护,这样在下一次调度执行可以进行现场恢复。M的栈保存在G对象,只有现场恢复需要的寄存器(SP,PC等),需要被保存到G对象。
如果G对象还没有被执行,M可以将G重新放到P的调度队列,等待下一次的调度执行。当调度执行时,M可以通过G的vdsoSP, vdsoPC 寄存器进行现场恢复。
P队列 P有2种类型的队列:
本地队列:本地的队列是无锁的,没有数据竞争问题,处理速度比较高。
全局队列:是用来平衡不同的P的任务数量,所有的M共享P的全局队列。
线程清理 G的调度是为了实现P/M的绑定,所以线程清理就是释放P上的G,让其他的G能够被调度。
主动释放(active release):典型的例子是,执行G任务时,发生了系统调用(system call),这时M会处于阻塞(Block)状态。调度器会设置一个超时时间,来释放P。
被动释放(passive release):如果系统调用发生,监控程序需要扫描处于阻塞状态的P/M。这时,超时之后,P资源会回收,程序被安排给队列中的其他G任务。
P的数量由 GOMAXPROCS环境变量,或者 runtime中 GOMAXPROCS()函数决定的。M的数量在 runtime/ debug包的 SetMaxThreads()决定。如果当前的M阻塞,就会新建一个新的线程。
M的数量和P的数量没有关系。如果当前的M阻塞,P的goroutine会运行在其他的M上,或者新建一个M。所以可能出现有很多个M,只有1个P的情况。
调度策略是为了尽可能地复用线程,避免频繁地创建,销毁线程。有2中策略:
Work Stealing: 当没有运行的G时,从其他P的队列上获得G
Hand Off: 当M阻塞时,将P转移到其他空闲的M。
全局的Goroutine队列,当Work Stealing失败,M可以从这个队列获取G任务。
考虑到有大量的G任务时,为了让每个G任务都有时间运行, runtime.main会创建一个额外的M,来运行 sysmon函数。抢占(preemption)在 sysmon中实现。
sysmon会进入一个无限循环,第一轮休眠20us,然后休眠时间倍乘,最后每次休眠时间达到10ms。sysmon有netpoll, retake(抢占),forcegc, scavenge heap等其他处理。
// Always runs without a P, so write barriers are not allowed.
//
//go:nowritebarrierrec
func sysmon() {
lock(&sched.lock)
sched.nmsys++
checkdead()
unlock(&sched.lock)
lasttrace := int64(0)
idle := 0 // how many cycles in succession we had not wokeup somebody
delay := uint32(0)
for {
if idle == 0 { // start with 20us sleep...
delay = 20
} else if idle > 50 { // start doubling the sleep after 1ms...
delay *= 2
}
if delay > 10*1000 { // up to 10ms
delay = 10 * 1000
}
usleep(delay)
now := nanotime()
next, _ := timeSleepUntil()
...
if atomic.Load(&scavenge.sysmonWake) != 0 {
// Kick the scavenger awake if someone requested it.
wakeScavenger()
}
// retake P's blocked in syscalls
// and preempt long running G's
if retake(now) != 0 {
idle = 0
} else {
idle++
}
// check if we need to force a GC
if t := (gcTrigger{kind: gcTriggerTime, now: now}); t.test() && atomic.Load(&forcegc.idle) != 0 {
lock(&forcegc.lock)
forcegc.idle = 0
var list gList
list.push(forcegc.g)
injectglist(&list)
unlock(&forcegc.lock)
}
...
unlock(&sched.sysmonlock)
}
}
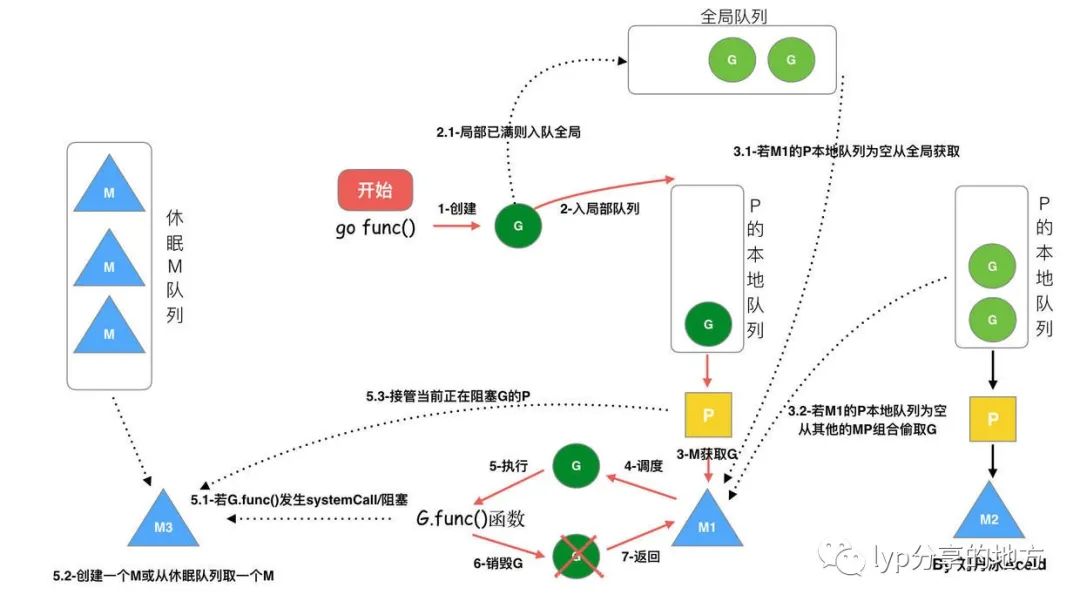
go func(){}创建一个新的 goroutine
G保存在P的本地队列,如果本地队列满了,保存在全局队列
G在M上运行,每个M绑定一个P。如果P的本地队列没有G,M会从其他P的本地队列,或者G的全局队列,窃取G
当M阻塞时,会将M从P解除。把G运行在其他空闲的M或者创建新的M。
当M恢复时,会尝试获得一个空闲的P。如果没有P空闲,M会休眠,G会放到全局队列。
M0: M0是首先创建的线程。它就像系统初始化,启动第一个G,然后变成普通的M。G0: 当M创建时,G0就创建了。G0用来调度其他的G。每个M都有自己的G0。当系统调用或者goroutine调度,G0的内存栈就会被占用。
看下面的例子,
package main
import "fmt"
func main() {
fmt.Println("Hello world")
}
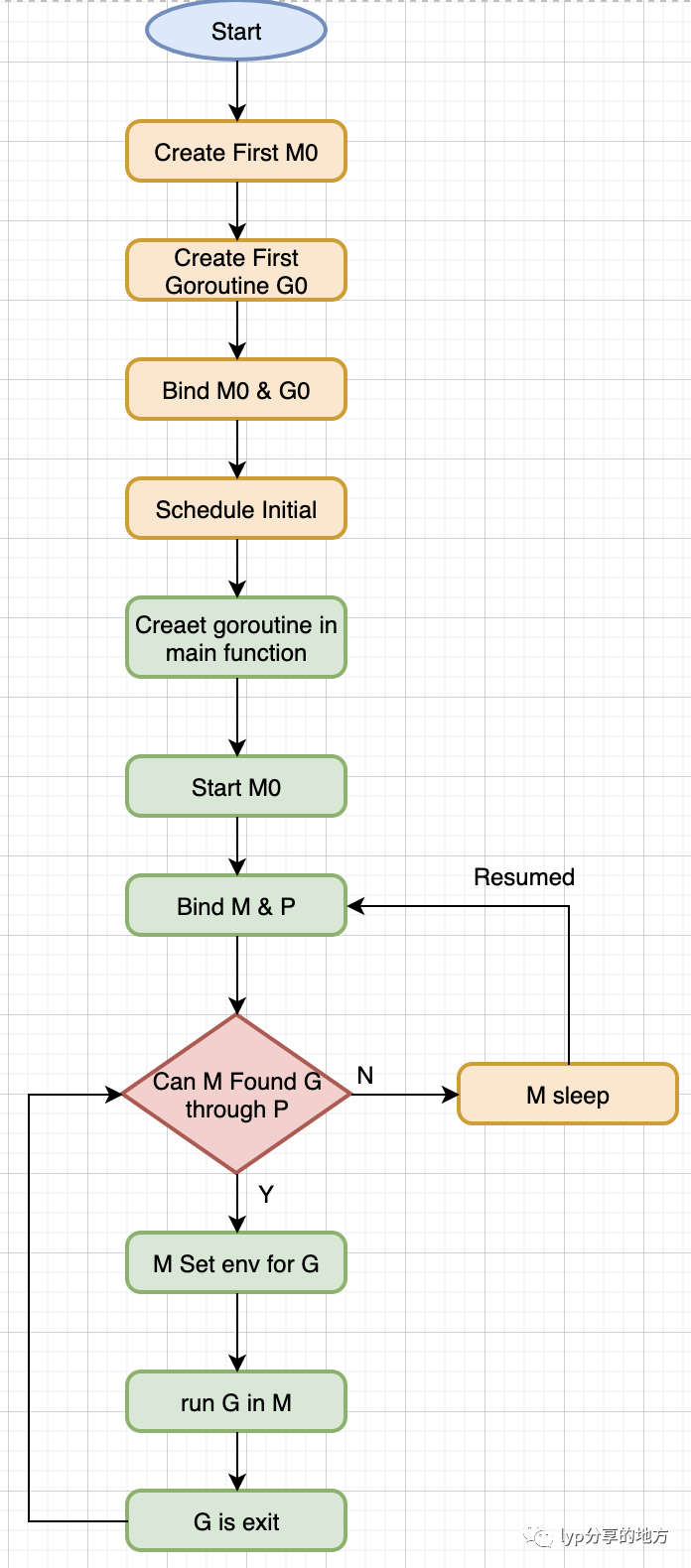
上面代码的流程图:
runtime创建M0,G0然后绑定他们
调度器初始化:初始化M0,栈,垃圾回收,创建初始的长度为 GOMAXPROCS的P列表
runtime.main创建代码的 main.main,创建主gorourine,然后放到P的本地队列
启动M0, M0绑定P
根据goroutine的栈和调度信息,M0设置运行环境
在M中运行G
G退出, runtime.main调用 defer, panic,最后调用 runtime.exit
https://www.timqi.com/2020/05/15/how-does-gmp-scheduler-work/
https://www.programmersought.com/article/98681581962/
我的公众号:lyp_share
我的知乎专栏
我的博客com
我的博客cn
如果觉得我的文章对您有用,请随意打赏。你的支持将鼓励我继续创作!
